Categories
- NEWS (6)
- TECHNICAL RESOURCES (6)
Cleaning robots usually use micro switches to help them sense and respond to changes in the environment when performing tasks. The MS4-1 micro switch is a mechanical switch. Its working principle is based on the fact that when an object is touched or pressure is applied to the switch, the circuit inside the switch is triggered.
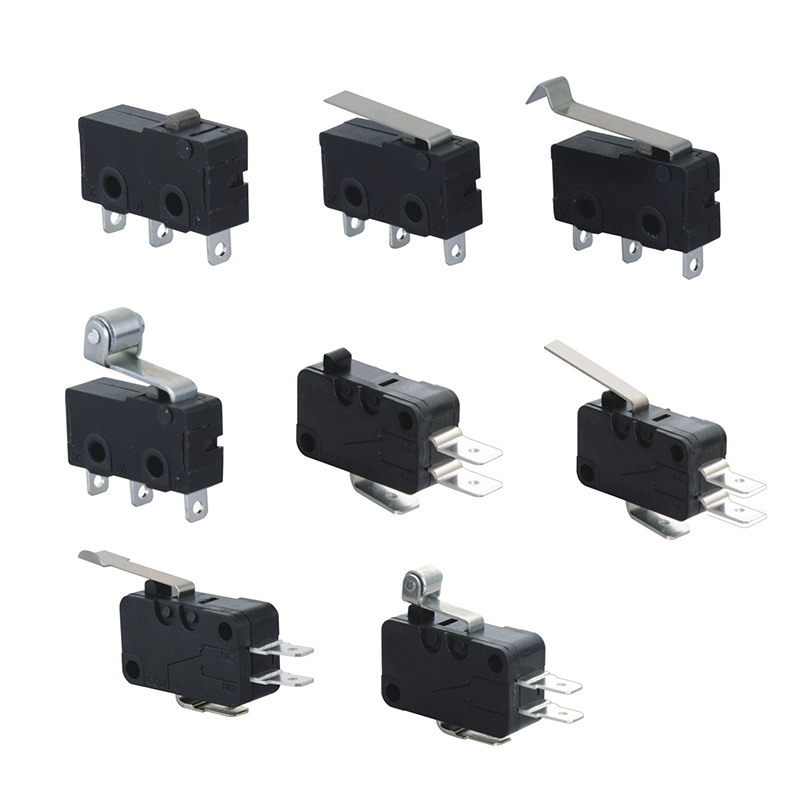
Micro Switch Type
There are one or more electronic contacts inside the MS4-1 microswitch. These joints are usually located in the path of motion of the cantilever arm. When the cantilever arm receives enough force or pressure to cause it to move, the contacts close or open, thereby changing the state of the circuit.
In the initial state, the contact of the MS4-1 microswitch is usually open, breaking the circuit. This means that current cannot pass through the microswitch. When an object or force is applied to the cantilever arm of the MS4-1 microswitch, the cantilever arm moves. This can be due to a collision of the robot or contact with obstacles in the environment.
The contacts of the MS4-1 microswitch are closed, and the robot can take corresponding actions according to the requirements of the program design, such as stopping, changing direction, or taking other measures to deal with the detected situation.
MS4-1 microswitches are often used in sweeping robots to detect collisions, edge detection, or trigger other sensing events, helping the robot avoid collisions, follow a predetermined path, or perform specific tasks. These switches are one of the key components of how the robot senses and reacts.

Micro switch for sweeping robot
The application of the MS4-1 micro switch in sweeping robots can help improve the functions of the robot and increase its intelligence and adaptability. The MS4-1 microswitch is used to detect collisions. When the robot collides with an obstacle, it can automatically stop or change direction to avoid damage to the robot or the environment. This helps improve the safety and durability of the robot.
The MS4-1 microswitch can be used to detect stairs, steps, or other steep surface changes. Robots can use these switches to avoid falls or slips, ensuring appropriate measures are taken when facing edges.
MS4-1 microswitches can be used to identify or detect specific areas, such as off-limits areas. The robot can avoid these areas based on the status of the microswitches, allowing for more precise navigation and task execution.
The sweeping robot can use micro switches to detect task completion. When it detects task completion, it can automatically return to the charging dock or notify the user.
The MS4-1 microswitch can also be used to detect other changes in the environment, such as the opening and closing status of doors, the position of items, or other sensing events. This helps the robot respond to different situations more intelligently.
The MS4-1 microswitch can also be used for user interaction, such as by pressing a button to start or stop the robot, or by triggering the robot to perform a specific task or mode.
By combining the MS4-1 microswitch with other sensing technologies such as lidar, cameras, and ultrasonic sensors, the sweeping robot can achieve more complex environmental perception and more advanced autonomous navigation, thus improving its functionality and adaptability. These features improve the robot’s performance, safety, and user experience.
Microswitches are an important technology in sweeping robots, which can help robots perceive and respond to different environmental changes more intelligently, improving the robot’s functionality, safety, and user experience. These application scenarios make sweeping robots more adaptable to diverse home and office environments.
 YUANFENG Rotary Switches In Use Of Oven
YUANFENG Rotary Switches In Use Of Oven